Torque drive
Direct drive type LTD
609818

Material
Operating temperature
Mounting position
Lubricant
Options
| Accuracy | |
| Speed | |
| Ø-Range | |
| Price |
Super compact and super individual: Franke direct drive with torque motor LTD
Basic-Data
- Housing steel or aluminium
- KKØ: 100 - 1800 mm
- Incremental measuring systems
- Absolute measuring systems
The advantages
- Compact design
- Large centre clearance
- Free choice of components
- Four standard sizes from stock
- Customised solutions
Function & benefits:
Compact
Dynamic
Energy efficient
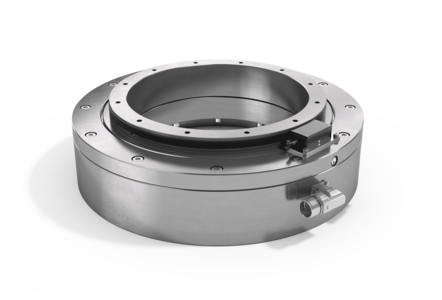
Compact design, large centre clearance
Franke bearing assemblies with integrated direct drive (torque motor) are characterized by high dynamics, maximum energy efficiency and a compact installation space combined with center-free design.
Franke slewing rings with torque motors are certified for use in clean rooms.
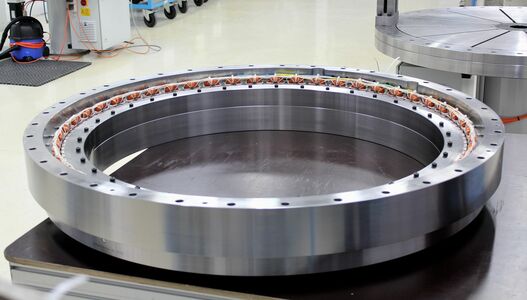

Available diameters
Franke bearings with direct drive are available in diameters from 100 mm to 1,800 mm.
Data Table

| Table 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | ΚΚØ mm | Load Ratings kN | Torque Nm | Power A | Speed 1/min. | Weight kg | |||||
| C0a | C0r | Ca | Cr | MNenn | MPeak | INenn | IPeak | nmax | |||
| LTD-0100 | 100 | 46 | 22 | 17 | 14 | 4.5 | 16 | 1.8 | 7 | - | 8 |
| Rated Data | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Product | MNennLk | INennLk | nNennLk | PNennLk | PVNennLk | PGNennLk | MHaltLk | IHaltLk | |||
| Nm | Aeff | U/min | W | W | W | Nm | Aeff | ||||
| LTD-0100 | 4.5 | 1.8 | ? | 1005 | 54 | 96 | 3.2 | 0 | |||
| Peak Load Data | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Product | MPeak | IPeak | nPeak | PPeak | PVPeak | PGPeak | |||||
| Nm | Aeff | U/min | W | W | W | ||||||
| LTD-0100 | 16 | 7 | 1130 | 1897 | 863 | 877 | |||||
| Performance Overview | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Product | kt | ke | ke | km | nLeer | nmax | fmax | Uzk | RPh20 | ||
| Nm/Aeff | Veff/(rad/s) | Veff/(U/min) | Nm/vW | U/min | U/min | Hz | VDC | Ω | |||
| LTD-0100 | 0.459 | 1.577 | 0.165 | 0.459 | 2390 | - | 398 | 560 | 4.419 | ||
| Measurement System | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Product | Measurement Principle | Reference Mark | Cable Length | Division Period | Line Count | Power Supply | Electrical Connection | ||||
| LTD-0100 | induktiv | 1 Referenzmarke | 1 | 1000 | 256 | 4V bis 7V DC | Flanschdose M23 | ||||
My contacts for this product
Your local contact
Franke GmbH
Obere Bahnstraße 64
D-73431 Aalen
Tel.: +49 7361 9200
vertrieb@franke-gmbh.de
Whitepaper slewing ring with torque drive
Find out more about slewing rings with integrated torque motor and why it is superior to other drive types in almost every respect.
In future, dispense with components such as gearboxes and drive pinions.
Further useful links